 English
English Espaol
Espaol Franais
Franais 阿拉伯
阿拉伯 中文(简)
中文(简) Deutsch
Deutsch Italiano
Italiano Português
Português 日本
日本 韩国
韩国 български
български hrvatski
hrvatski esky
esky Dansk
Dansk Nederlands
Nederlands suomi
suomi Ελληνικ
Ελληνικ 印度
印度 norsk
norsk Polski
Polski Roman
Roman русский
русский Svenska
Svenska
三一310挖掘机液压系统原理图与维修技术
三一310挖掘机液压系统原理图与维修技术
|
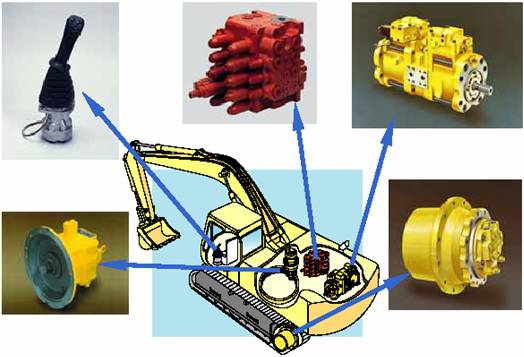
SY310采用的是双泵双回路恒功率控制液压系统,带四种功率控制模式、中位负流量控制、两液压主泵按全功率变量。
主要液压元件选用日本KAWASAKI(川崎),KAYABA液压件和KAYABA,其型号规格如下
1.1主泵: K3V140DT-1AER-9TCM
柱塞式串联变量双泵,最大排量1402ml/r,该泵按总功率恒定进行变量。
1 电液比例阀 A1,A2 主泵输出油
2 电液切换控制阀 Psv1,Psv2 电液比例阀供油
3 导向活塞 PN1,PN2 负流量压力
4 阀柱 Dr 泄油
5 伺服活塞 A3 先导泵出油
6 前泵 B1 主泵吸油
7 后泵 B2 先导 泵吸油
8 先导泵
9 先导溢流阀
1. 2主操作阀采用川崎KMX15R/B45000C,最大流量270L/min,能实现动臂提升合流、斗杆大小腔合流、斗杆再生回路、行走直线、动臂提升优先、回转优先、斗杆闭锁等功能。
|
1 斗杆保持阀(锁紧阀) 2 斗杆过载溢流阀 3 斗杆控制阀1
4 限位油缸(回转优先) 5 斗杆再生阀 6 动臂合流单向阀
7 动臂控制阀2 8 单向阀 9 回转优先阀
10 回转控制阀 11直线行走控制阀 12左行走控制阀
13主溢流阀 14右行走控制阀 15备用控制阀(破碎锤、液压剪)
16过载溢流阀 17动臂控制阀1 18动臂过载溢流阀
19动臂保持阀(锁紧阀) 20铲斗控制阀 21铲斗过载溢流阀
22斗杆控制阀2 23优先节流阀 24单向阀
25动臂优先阀 26负流量控制阀 27旁通截止阀
1.2.1为提高作业效率,提高构件运动速度,动臂提升,斗杆大小腔都实现双泵合流,其工作原理如下:
动臂提升合流BOOM2阀把泵1的流量引到动臂大腔,实现合流。
斗杆合流是通过ARM2阀把泵2的流量引到斗杆大腔或小腔,实现合流。
1.2.2斗杆再生回路,当斗杆无负载下落时,为提高斗杆运行速成度,在斗杆油缸伸出时,把活塞杆腔的油引回大腔,实现再生功能,其工作原理如下图:

由于斗杆无负载,斗杆油缸大腔压力很小,两位两通阀在弹簧的作用下往下运动,关闭活塞杆腔的回油通道,这样活塞杆腔的油就直接回到油缸大腔、实现活塞杆的快速伸出。
1.2.3行走直线功能,当挖掘机陷入坑中或其它特殊工况时,要求挖掘机能边行走边动工作装置(动臂、斗杆、铲斗、回转),能实现挖掘机的自救或其它功能,其工作原理如下:
当行走操作阀动作时,PG左侧节流后的油的回油通道被关闭,油压上升,使SQ阀往下移动,此时若有其它动作时,PG右侧节流后的油的回油通道被关闭,油压上升,使TS阀往左移动,如下图,这样P2泵的油通过TS阀给左右行走供油,P1泵给其它动作供油。
1.2.4优先回路:在并联回路中,当要两个动作同时运动时,必需使两个动作的负载相同,否则,负载大的动作就不会运动,在挖掘机中为提高作业效率,很大一部分时间都要求两个动作同时运动,比如动臂提升与斗杆、回转与斗杆,但此时动臂提升的负载很大、回转起动的负载很大,所以要优先保证动臂提升,回转起动,其工作原理如下图所示:
当动臂提升与斗杆复合动作时,在斗杆阀前端节流提高其负荷,保证动臂能够提升。
1.2.5中位负流量控制信号:为了实现液压主泵的中位负流量控制,在阀处于中位时,要把中位信号检测出来,去控制主泵,其工作原理如下图:
当阀处于中位时,P1,P2通过阀的中位油道,最后经过NR1,NR2节流后回油箱,在节流口NR1,NR2前取得压力信号FL,FR,就可以控制主泵到最小排量。
1.2.6斗杆、动臂闭锁,为防止斗杆下掉,阀组内装有斗杆闭锁阀,它由控制阀HV和锥阀构成,其原理如下图:
1.3回转机构采用川崎M5X180B—CHB—10A,最大流量280L/min,液压马达排量121cm³/r,减速机速比20.04,齿轮轴输出。回转马达带有停车制动器,制动阀,缓冲阀,延时阀。
|
1 回转减速机 2回转马达 3回转制动溢流阀
4 防摆阀(回转减震阀) 5 回转延时阀
1.4行走机构采用行走马达MAG-170VP-5000,液压马达排量170.4/109cm³/r,减速机速比64.739,带常闭式制动器、制动阀、防冲击阀。
2.5中央回转接头是联接回转平台与底盘油路的液压元件,它保证回转平台旋转任意角度后,行走马达还能正常配油,现用回转接头是6通。
斗杆动作回路图
|
动臂动作回路图
铲斗动作
|
回转动作
行走动作
沃尔沃柴油发动机维修,德国曼柴油发动机维修.珀金斯柴油发动机维修,奔驰MTU柴油发动机维修,三菱柴油发动机维修
400-100-8969 15088860848
0574-26871589 15267810868
0574-26886646 15706865167
0574-26871569 18658287286
